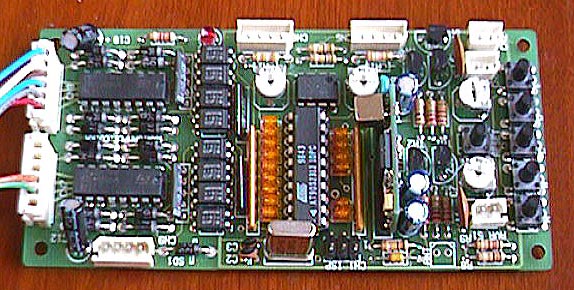
 확대한 사진
확대한 사진| 처음으로 | 1단계 | 2단계 |3단계 | 4단계 | 5단계 | 음식나르는 로보트 제작하기 | 문의사항 | 로보트 스토아 |
3단계 : 로보트의 머리부분인 컨트롤러를 제작한다.
로보트를 제어하는 컨트롤러는 기본적으로 '마이크로 컨트롤러( Micro Controller)'라는 일종의 소형 컴퓨터가 내장된 것이어야합니다. 구체적인 내용은 차후에 설명하기로하고 여기서는 우선 현재 판매되고 있는 마이크로 컨트롤러 중 가장 속도가 빠른 '에이브이알(AVR)이라는 제품을 탑재한 샘플전자의 맥가이버 컨트롤러를 이용해 보기로 하겠습니다.
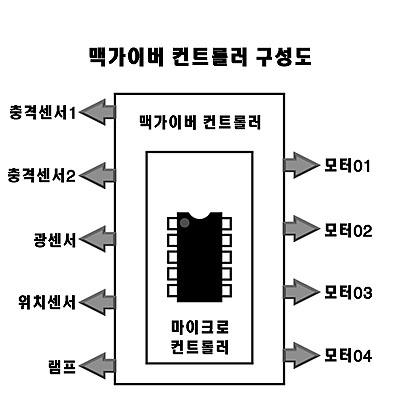
맥가이버 컨트롤러는 4개의 모터를 양방향으로
제어하고,광센서,충격센서,음성녹음기 등을 부착할 수 있고
원격 제어를 위한 송수신모듈(무전기 기능)을 내장할 수있는 다양한
기능을 가지고 있는 컨트롤러입니다.
* 맥가이버 컨트롤러(맥가이버 A)의 가격 : 69,000원
1. 조립된 완제품입니다.
2. 베이직 프로그램(베스컴 베이직)은 1k 까지 사용할 수있는 제품이
포함되어있습니다.
3. 컨트롤러에 프로그램을 인식시키기 위한 케이블은
포함되어있습니다.
4. 케이스는 없으며 건전지와 무선송수신 모듈은 별도로 판매됩니다.
5. 구입장소 : 로보트스토아
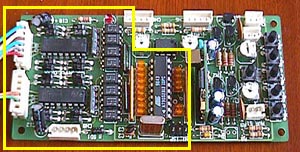
음식 나르는 로보트에 사용하기위해 필요한 부분을
노란선으로 표시했습니다.
노란선 안의 부분을 납땜하면 모타 4개를 양방향으로 제어할 수
있습니다.
모타 제어용 맥가이버 컨트롤러(맥가이버 AM) 가격 :
55,000원
1. 조립된 완제품으로 4개의 모타를 양방향으로 제어할 수 있으며,
상기 그림의 노란부분에 해당되는 부품이 납땜되어 있습니다.
2. 베이직 프로그램(베스컴 베이직)은 1k 까지 사용할 수있는 제품이
포함되어있습니다.
3. 컨트롤러에 프로그램을 인식시키기 위한 케이블은
포함되어있습니다.
4. 케이스는 없으며 건전지는 별도로 판매됩니다.
5. 구입장소 : 로보트스토아
1단계 : 어떤 로보트를 만들 것인가를
결정한다.
2단계 : 로보트를 제작하기 위한 재료를 준비한다.
3단계 : 로보트의 머리부분인 컨트롤러를 제작한다.
4단계 : 로보트가 지시한 대로 움직일 수 있도록
프로그램을 작성한다.
5단계 : 로보트를 작동시켜 본다.