| 로보트사관학교 - 첫페이지 | 1단계 | 2단계 | 3단계 | 4단계 | 5단계 | 문의사항 | 로보트 스토아 |
|음식나르는 로보트 - 첫 페이지 | 프로그램 사용방법 | 전선 연결하기 | 프로그램 작성하기 | 맥가이버에 프로그램 넣기 |
맥가이버 컨트롤러에 작성한 프로그램을 넣기
프로그램 작성이 완료되었으며 다음의 절차에 따라 로보트를 제어하면 됩니다.
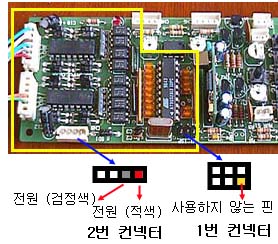
1. 맥가이버 컨트롤러의 1번 컨넥터(맥가이버 컨트롤러와 함께 제공됨)와 컴퓨터의 프린터 포트(25핀 케이블)을 연결한다.
컨넥터 케이블을 자세히 보면 한개의 핀에는 전선이
연결되어 있지 않은 것을 알 수 있습니다.
즉, 5개의 핀만 사용이 되므로 그림의 '사용하지 않는 핀'에 전선이
연결되지 않을 부분이 위치하도록
컨넥터를 연결합니다.
2. 전원을 연결합니다. 맥가이버 컨트롤러는 4볼트
이상 6볼트 이하의 전원이 공급되어야 작동하므로
제공된 전원선을 그림의 '2번 컨넥터' 부분에 연결합니다. 단, 그림
우측에 보이는 모터와 연결된 부분의
컨넥터는 연결되어 있지 않아야합니다.
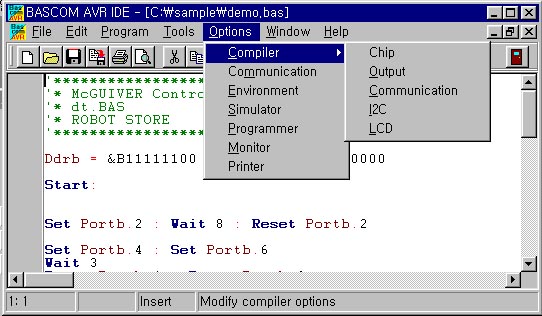
3. 이제 옵션을 설정하는 단계로 아래 그림처럼 옵션(Option)을
눌러서 컴파일러(Compiler) 중에
칩(Chip)을 누릅니다.
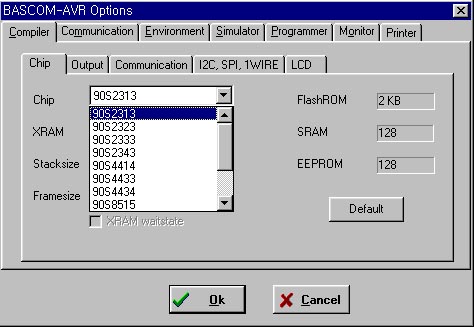
다음으로는 맥가이버 컨트롤러에 사용된 '마이크로
컨트롤러'를 선택합니다.
아래와 같은 화면에서 90S2313을 눌러 선택합니다.
맥가이버 컨트롤러에는,
 90S2313이라는 세계에서 가장 속도가 빠른
마이크로컨트롤러가 탑재되어있습니다.
90S2313이라는 세계에서 가장 속도가 빠른
마이크로컨트롤러가 탑재되어있습니다.
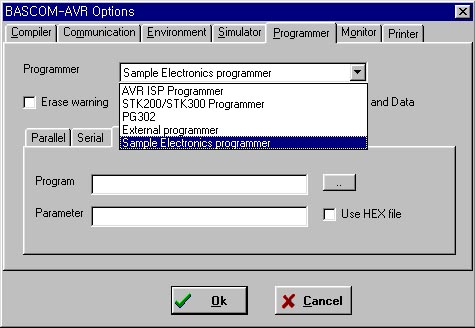
다음 단계로 그림에서 처럼 프로그래머(Programmer)를
선택합니다.
여기에서는 샘플전자에서 제작한 Sample Electronics programmer를 선택하고
아래 부분의 오케이(OK) 버튼을 누르면 기본 작업이 완료됩니다.
4. 준비가 완료되었습니다. 이제 베이직 언어로 작성된
프로그램을 '로보트'가 인식할 수 있는 기계언어로
변경[이 작업을 컴파일(Compile)이라고 한다.]합니다.
컴파일 아이콘 ![]() 을 눌러 컴파일을 합니다.
을 눌러 컴파일을 합니다.
5. 프로그램 넣기 - 프로그램 라이팅(Writing)이라고
부르는 작업으로 작성된 프로그램을 마이크로 컨트롤러의
기억장치에 써넣는 작업입니다.
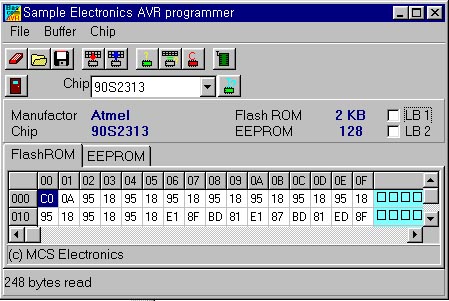
라이팅 아이콘 ![]() 을 눌러 프로그램을 써넣기합니다. 다음과
같은 화면이 나타날 것입니다.
을 눌러 프로그램을 써넣기합니다. 다음과
같은 화면이 나타날 것입니다.
그리고 자세히 보면 제조회사(Manufactor)에 아트멜(Atmel),
칩(Chip)에 90S2313이라고 보일 것입니다.
와 이제 진짜 마지막입니다.
아래 그림에 있는 아이콘 중에서 '지우고 쓰기' 아이콘 ![]() 을 누르면
프로그램이 마이크로 컨트롤러로
을 누르면
프로그램이 마이크로 컨트롤러로
들어가게 됩니다.
이제 컨넥터 1번을 빼고, 로보트와 맥가이버
컨트롤러를 연결(전선 연결하기 참조)합니다.
로보트가 정상적으로 작동될 것이입니다.
문의사항이 있으면 언제든 연락을 주세요.문의사항
감사합니다. - 맥가이버 1999년 11월 29일